| Home |
| Projects |
| Curriculum Vitae |
| Contact |
|
This ray tracer
was written in C++ from scratch for
the Computer Graphics assignment. The SDL is used for presenting
the images to the user. The following
primitives are supported: spheres, planes and sphereflakes (which were added
to obtain reasonable comparison of the ray tracing acceleration
algorithms). As part of the assignment the following features were implemented:
Shadows implementation At each intersection point, a shadow ray is shot towards each light source and the contribution of this lightsource is taken into account if the shadow ray does not intersect any other objects along its path. In order to avoid surface acne (black spots on the surfaces of objects due to numerical imprecisions leading to incorrect self-shadowing) any intersections near the ray origin are discarded. 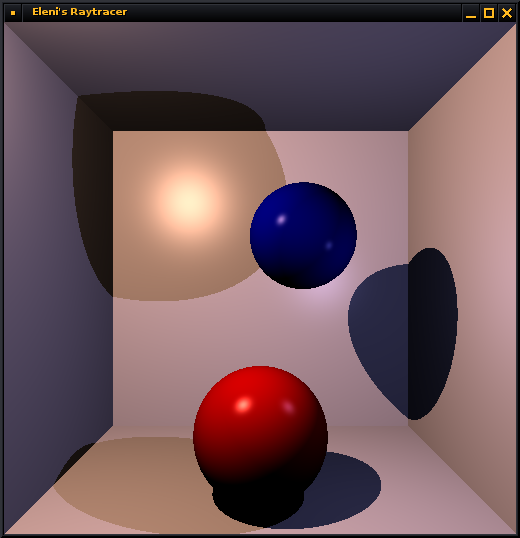
Reflections Reflections are rendered by recursively tracing secondary rays, when an intersection with a reflective object occurs. A maximum recursion limit is used to avoid infinite recursion. 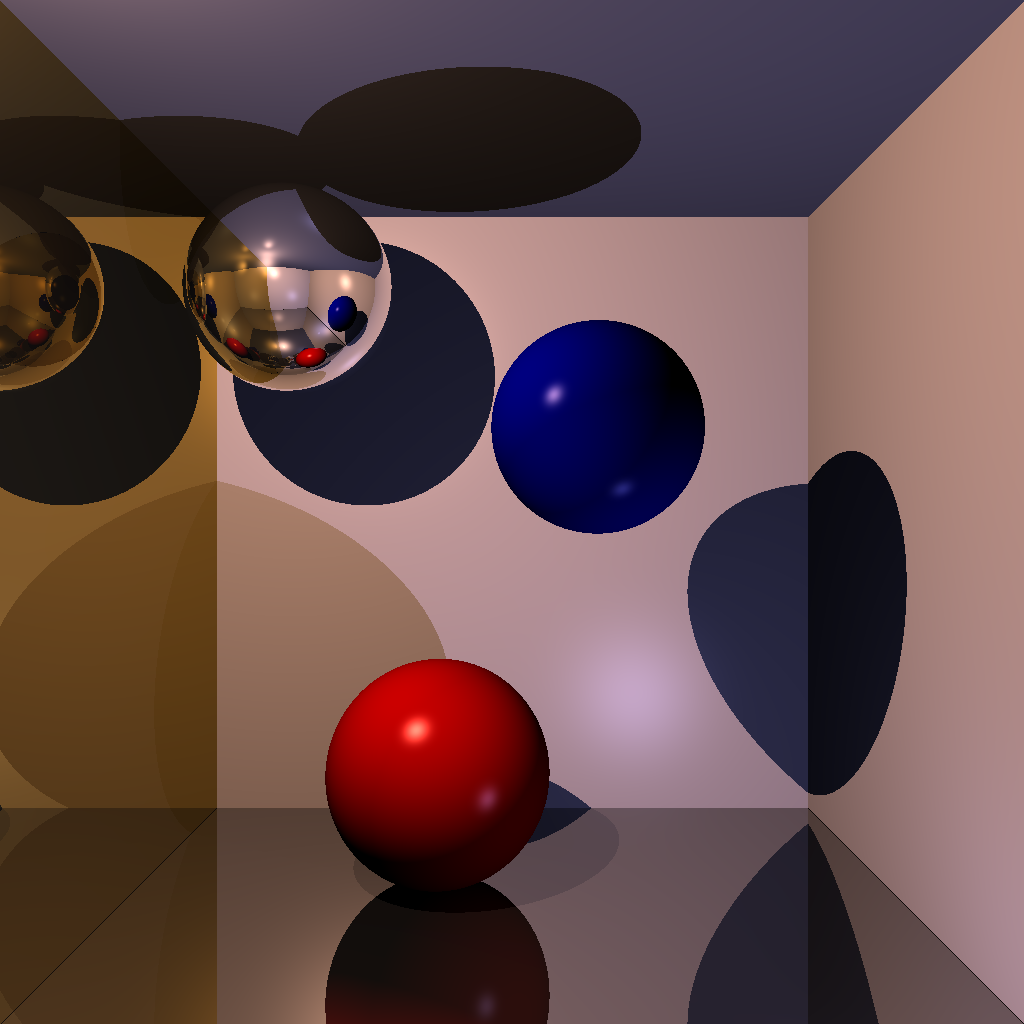
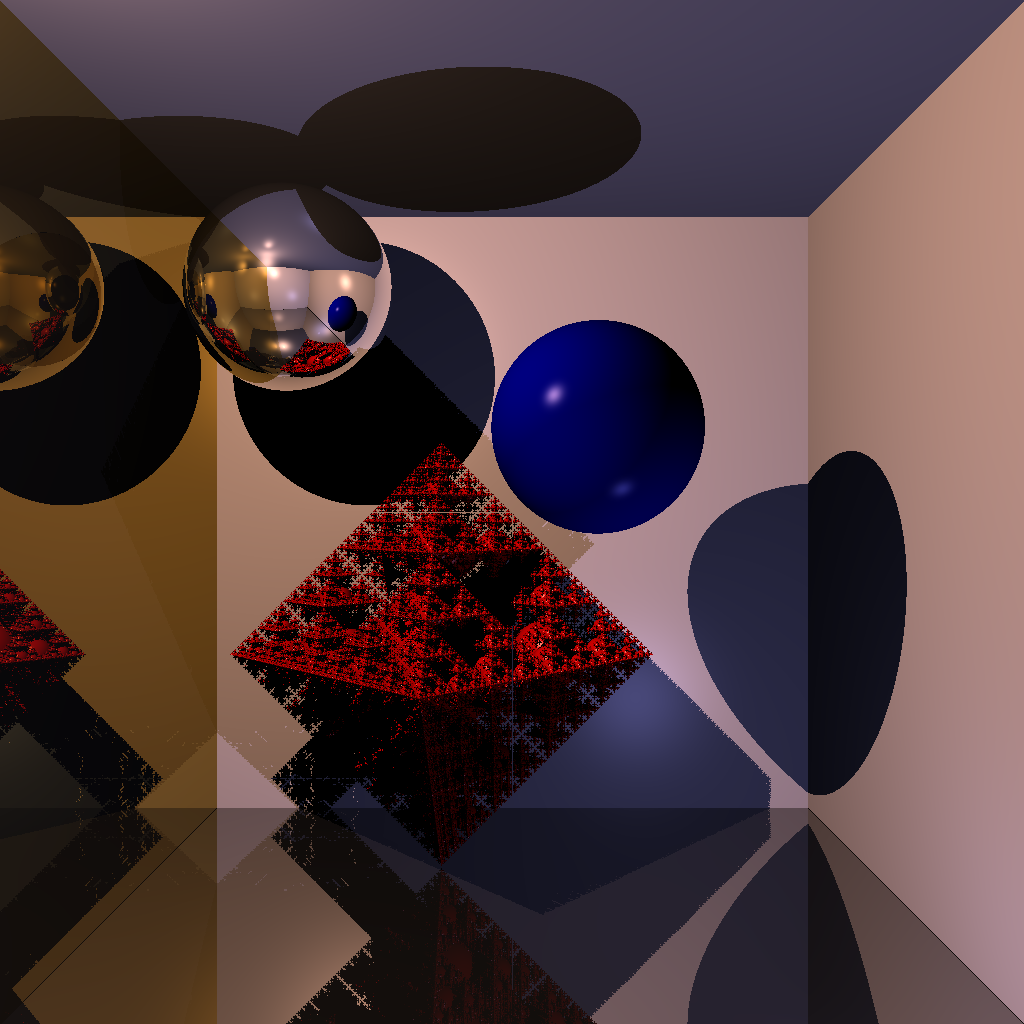
Ray tracing acceleration Axis aligned bounding boxes are calculated for each object during initialisation. The ray-object intersection functions test the ray against the object's bounding box before calculating intersections with the object itself. Because the scenes are made out of very simple primitives which are trivial to intersect a new arbitrarily complex primitive was introduced: the sphereflake fractal. In order to further improve rendering performance, a hierarchy of axis aligned bounding boxes was constructed for the superflake. 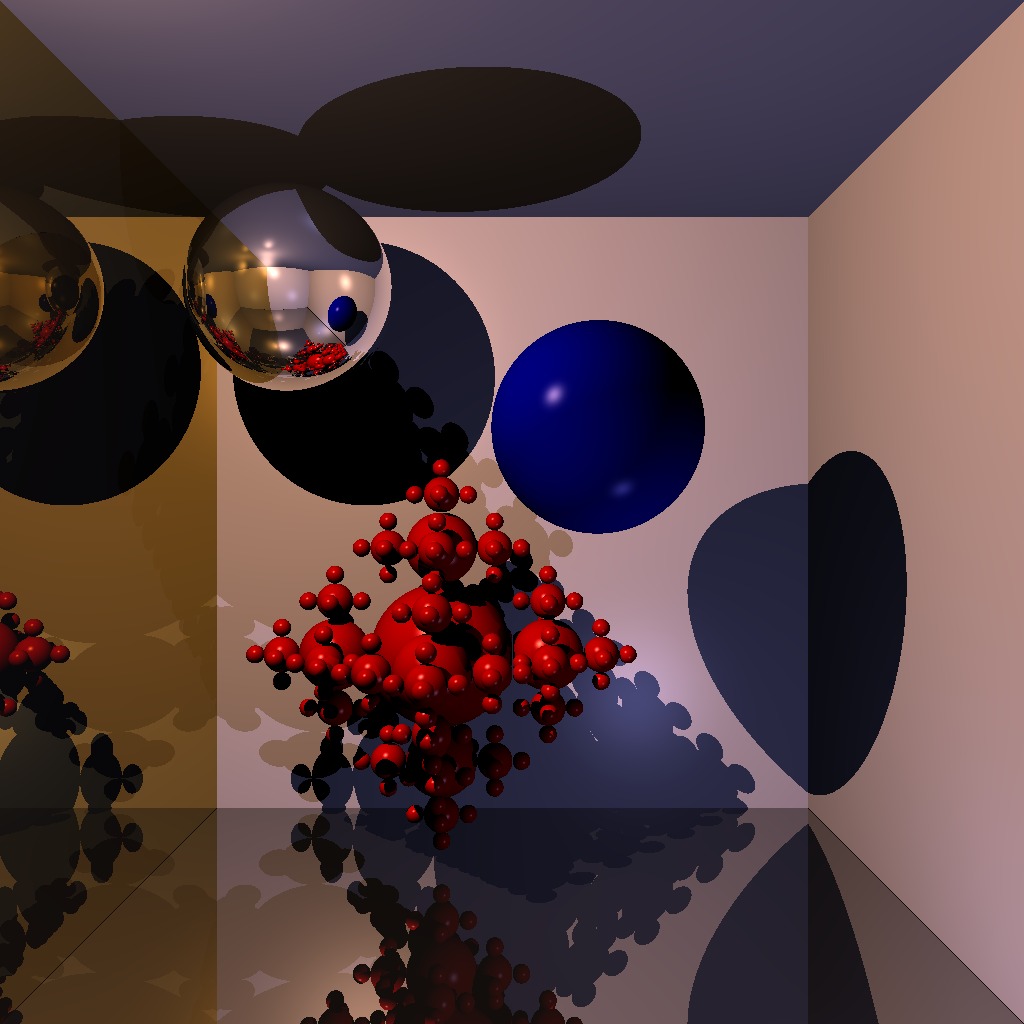
Tests conducted The rendering meantimes where calculated by taking 12 measurements, removing the 2 outliners and averaging the rest. Test 1: Brute force ray tracing vs BV for primitive objects A scene with planes and spheres was rendered with per object bounding boxes (AABB) and then without bounding boxes (brute force ray tracing). The mean rendering times when the AABB algorithm was used were:
Test 2: Brute force vs BV for objects with more complex primitives A scene with planes, spheres and a sphereflake with 4 iterations (259 spheres) was rendered with per object bounding boxes and then without bounding boxes (brute force ray tracing). The render mean times where:
Test 3: BVH vs BV A scene with planes, spheres and a sphereflake with 4 iterations (259 spheres) was rendered with BHV and per object bounding boxes. The render mean time was:
Test 4: BVH vs BV for very complicated objects The previous scene but with a sphereflake with 8 iterations (335923 spheres) was rendered.
Code: The code can be downloaded from here and it runs on Linux. You must specify a scene description file. Notes: 1. An axis-aligned bounding box, or AABB for short, is a box aligned with coordinate axes and fully enclosing some object. Because the box is never rotated with respect to the axes, it can be defined by just its center and extents, or alternatively by min and max points. |