| Home |
| Projects |
| Curriculum Vitae |
| Contact |
|
Particle Systems in C++, OpenGL:
A particle system that can simulate different effects (fire, smoke, fireworks) for different parameters, textures and primitives. Experiments with motion blur, blending etc. Demo: Code: The code can be downloaded from here. |
|
Morphing:
An experiment where I tried to morph a 3D object to another 3D object. For the code and more details check this blog post. Demo: |
|
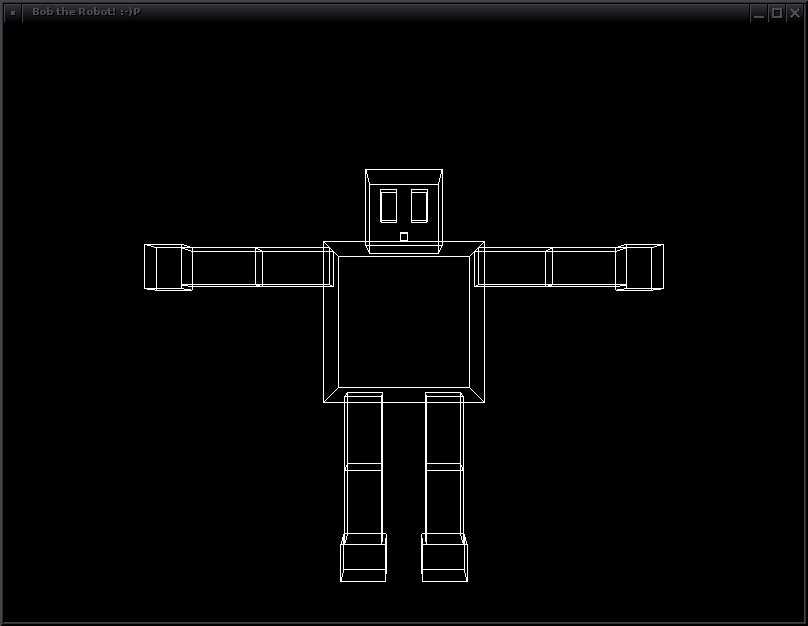
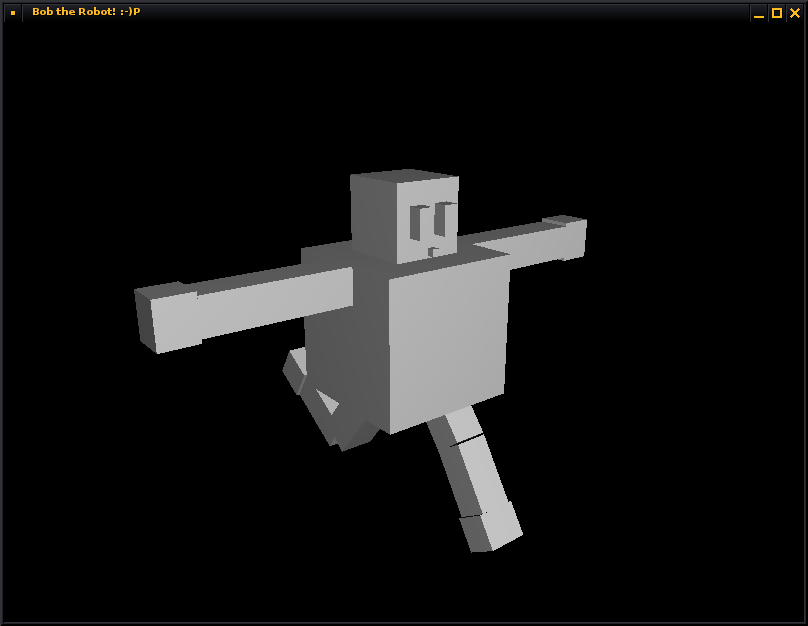
Hierarchical animation using trigonometric functions: This program was written in C++ for my Computer Graphics MSc assignment. It is a simulation where a varying number of robots made by transformed cubes walk in different directions without collisions. The robot parts are parts of a transformation hierarchy. Trigonometric functions are used for the animation. A demonstration on youtube: The robot parts are part of a hierarchy tree:
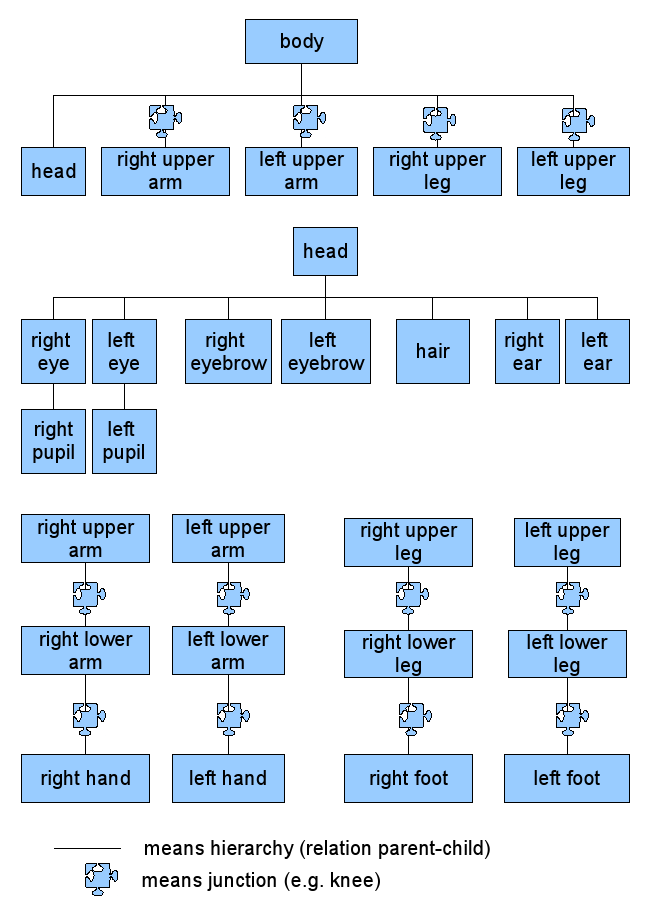
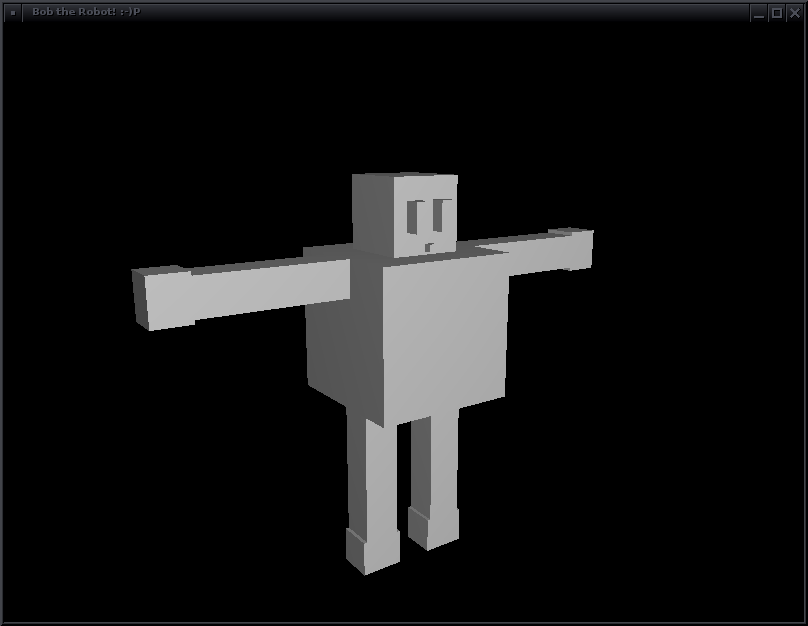
The robot is animated using trigonometric functions. Their output is restricted to match the rotation angles of the human joints. The total transformation of each part consists of its transformation parameters concatenated with its parent transformation. In essence, while rendering the robot we traverse the hierarchy multiplying transformations as we go down the tree. Code: The code can be downloaded from here Funny screenshots: 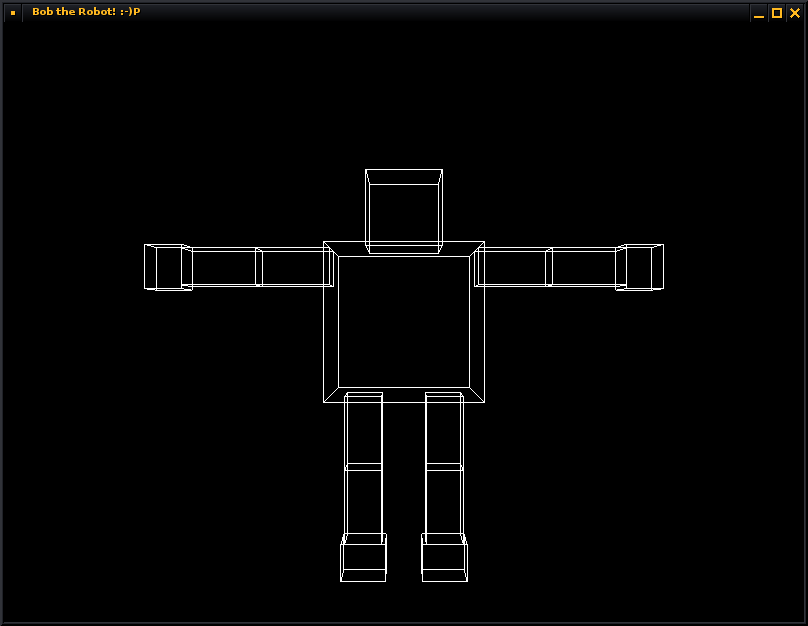

|