| Home |
| Projects |
| Curriculum Vitae |
| Contact |
|
Hierarchical animation using trigonometric functions:
This program was written in C++ for my Computer Graphics MSc assignment. It is a simulation where a varying number of robots made by transformed cubes walk in different directions without collisions. The robot parts are parts of a transformation hierarchy. Trigonometric functions are used for the animation. Youtube Demo: Robot Construction - Hierarchy The robot parts are part of a hierarchy tree:
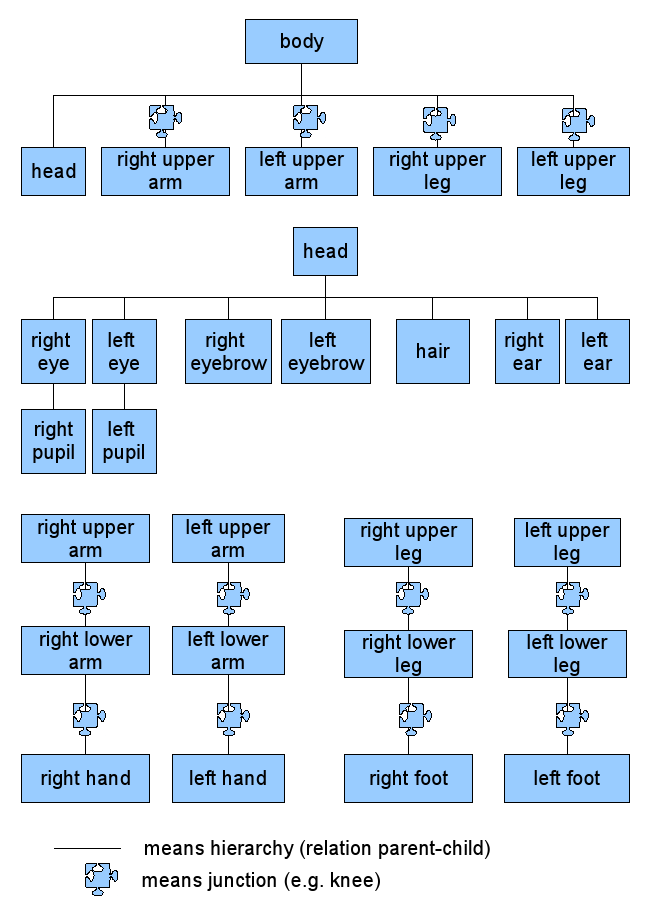
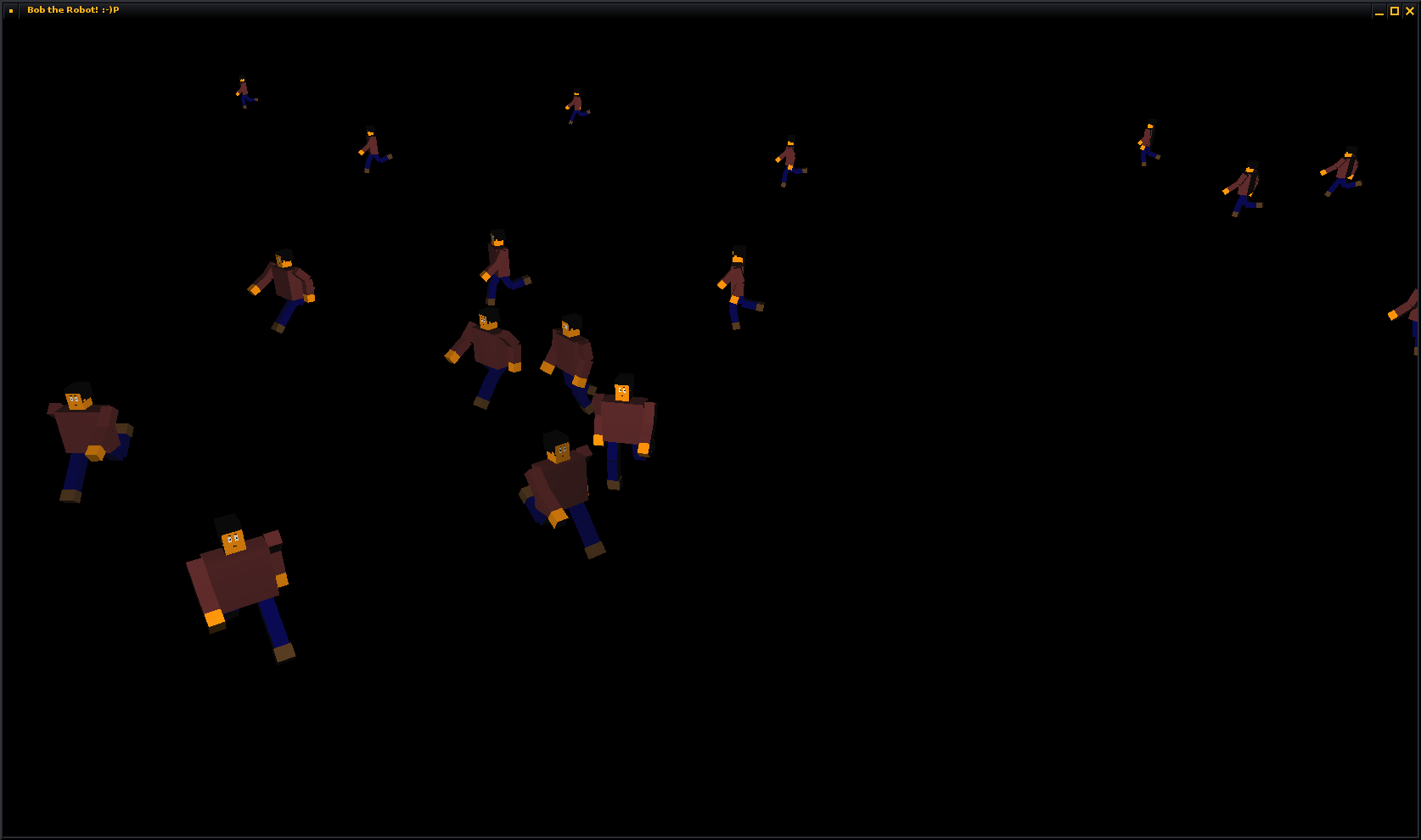
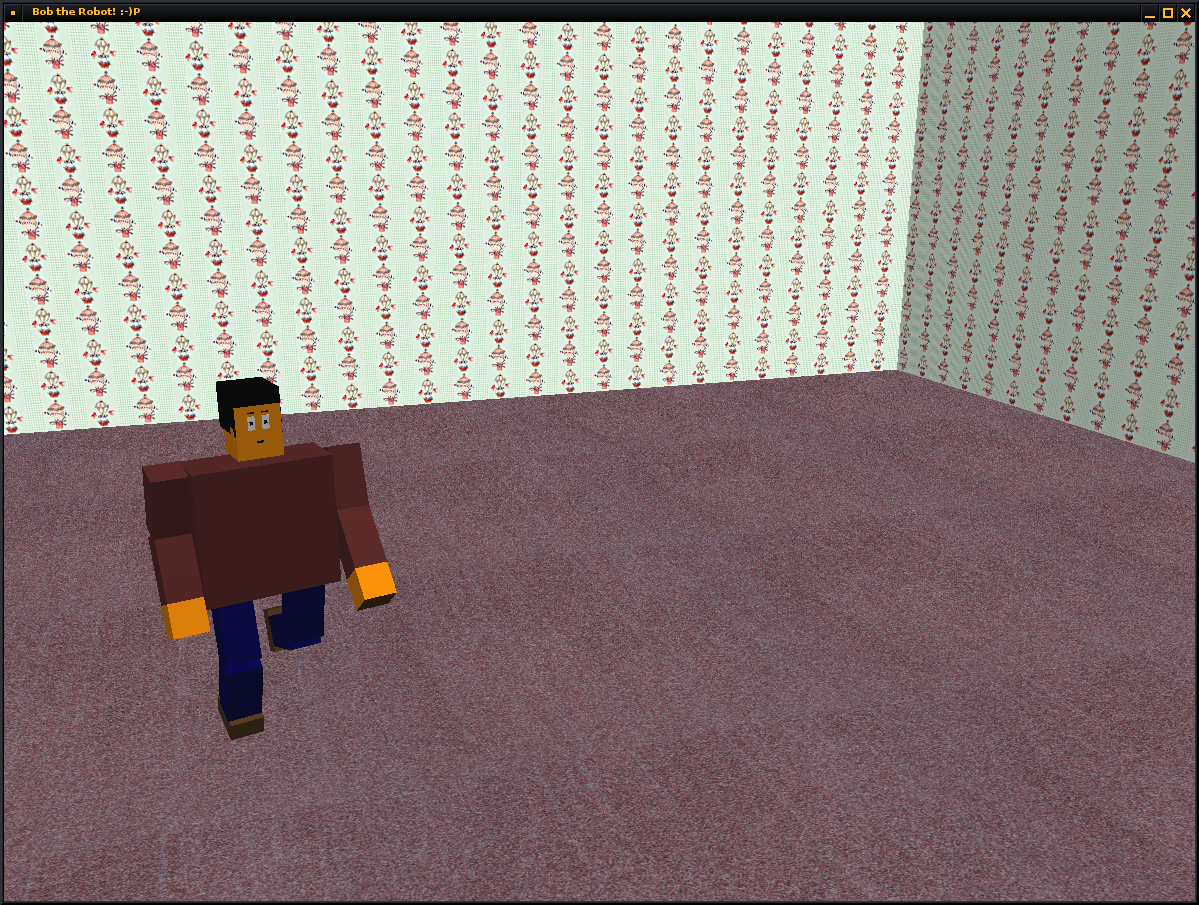
The hierarchy tree. Robot Animation The robot is animated using trigonometric functions. Their output is restricted to match the rotation angles of the human joints. The total transformation of each part consists of its transformation parameters concatenated with its parent transformation. In essence, while rendering the robot we traverse the hierarchy multiplying transformations as we go down the tree. Number of animated robots The program was extended to support an arbitrary number of animated robots. The robots are walking in circles with different radii and offsets. Hence, there are no collisions between them and they look like running in random points around the circuimference. The scene (a children room) is resized automatically to account for the number of robots running around in order to avoid collisions with the walls as you can see in figures 4 and 5. Code The code can be downloaded from here It runs on Linux, BSD, MacOSX.
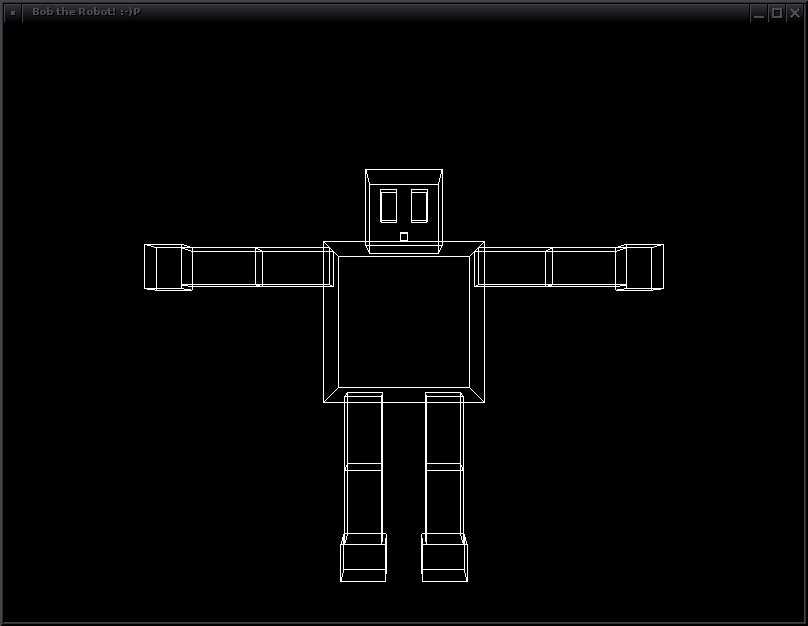
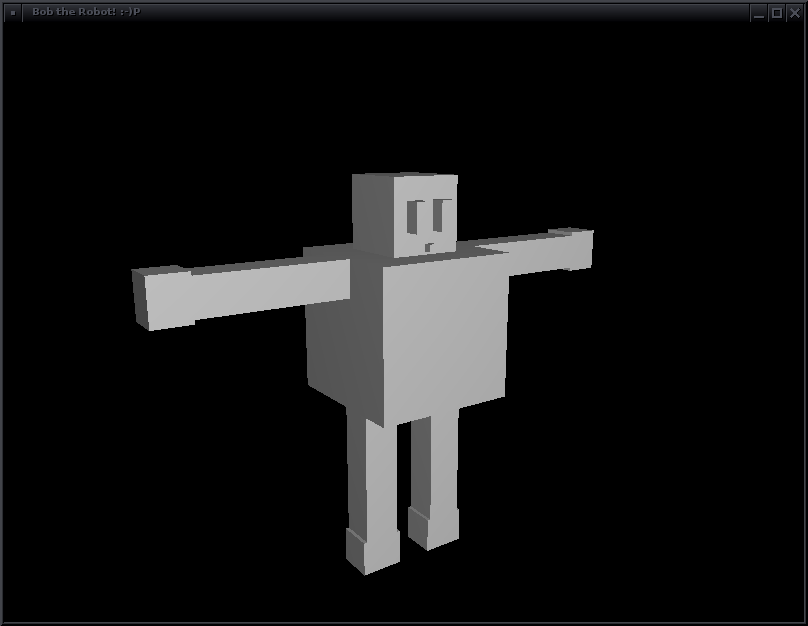
Screenshots from early development stages 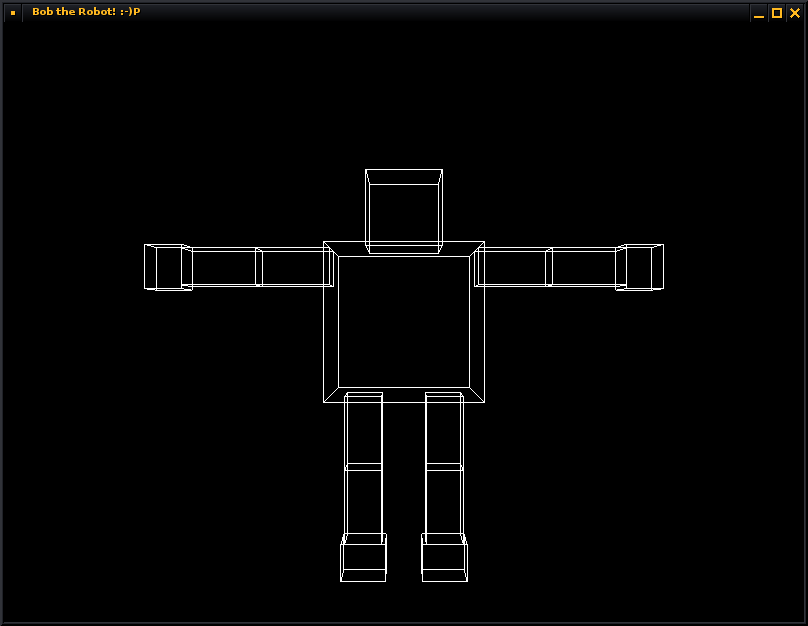

|